2018-08-16 click: 9522
摘要:針對蝸桿檢測要求高和批量大的需求,本文在流水線化測量理念的基礎上,設計了蝸桿M值自動分選機。通過將流水線化測量分解為上料-檢測-分組三個任務,儀器采用上料及工件傳輸模塊、齒面清理模塊、測量模塊、激光打標模塊、分組裝箱模塊及各種控制單元完成上述需求。并在測量模塊中采用哈爾濱精達測量儀器有限公司的“雙片簧精密測量機構”數字式二維測頭,實現了以精密測量為基礎的蝸桿M值自動檢測線,為蝸桿大批量高精度檢測提供了新途徑。
關鍵詞:M值 檢測線 數字式二維測頭 蝸桿
0引言
隨著汽車制造業和機器人行業的快速發展,蝸桿作為傳動系統的主要零部件之一,其制造精度要求也在不斷提高。在汽車車窗升降、電動座椅等傳動系統中,大量采用小模數蝸輪蝸桿傳動,一般蝸輪采取鑄塑工藝的塑膠材料制造,由于制造工藝等原因,蝸輪齒厚變化較大,導致蝸輪和蝸桿做嚙合運動時傳動側隙難于控制,對傳動系統的精度與動態特性(特別是振動與噪聲)有直接影響[1]。為保證蝸輪蝸桿嚙合傳動的平穩性,雖然蝸桿通過機械加工可以達到比較高的精度及齒厚(以M値進行度量)一致性,但是需要刻意對蝸桿的齒厚情況進行分組以保證與不同齒厚的蝸輪進行配合,控制側隙的一致性。在大批量生產條件下,如何能實現齒輪(蝸桿)的高精度快速檢測分組,并具有多種輔助功能的生產現場測量線,已成為提升產品質量的關鍵設備。
目前國外為實現齒輪的快速檢測,已經做了一些研究并有一些產品,如霍梅爾(Hommel)的專用多參數全自動綜合測量分選機,適用各種汽車零件,實現大批量快速檢測,可自動分組、打標記、自動分選等多種功能[2]。日本大阪精機AG系列齒輪分選測量系統一般由雙嚙儀、單嚙儀等組成。另外包括拋光設備、清洗設備和分選設備。用于齒輪驗收、分選及工藝監督[2]。上述齒輪分選測量系統采用的是傳統雙面嚙合一維測量原理,該方法不能完全反應齒輪(蝸桿)軸線方向的齒厚變化量。而本文以精密測量技術為基礎采用哈爾濱精達測量儀器有限公司特殊設計的“雙片簧精密測量機構”數字式二維測頭對齒槽進行單面測量,采用“測頭跟隨”技術反映了蝸桿齒厚沿軸線方向的連續性,同時,包含了齒輪清洗、打標、激光打標、分組裝箱等輔助功能,實現了蝸桿M值高精度流水線化測量,為蝸桿大批量、高精度檢測提供了新途徑。
1蝸桿M值測量原理
如圖1所示,將直徑相同的兩根圓棒自由地放在齒輪的相對兩個齒槽內,對于奇數齒,兩圓棒應放在中心距為最大弦長的兩個齒槽內,用千分尺或各種測微儀、測長儀等計量器具測出兩圓棒外側最遠點的M值尺寸。測得值與公稱M值之差即為M值的偏差  。將
。將  代入以下公式,即可求出分度圓弦齒厚偏差
代入以下公式,即可求出分度圓弦齒厚偏差  :當齒數為偶數時,
:當齒數為偶數時,  ;當齒數為奇數時,
;當齒數為奇數時,  。
。

式中,  是分度圓壓力角;
是分度圓壓力角;  是圓棒中心所在圓壓力角;z是被測齒輪齒數;
是圓棒中心所在圓壓力角;z是被測齒輪齒數;  是圓棒直徑,
是圓棒直徑,  ;
;  是變位系數;m是被測齒輪模數。當
是變位系數;m是被測齒輪模數。當  時,
時, 
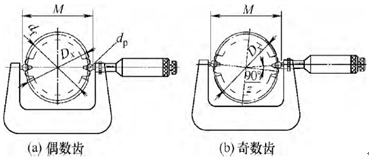
圖1 圓棒測量M值尺寸
上述測量中只是完成對齒輪某個端面的M值,若想測量沿著軸線方向齒厚的變化量,就需要增加測球沿著齒輪軸線方向的自由度。
本文采用以測微傳感、精密光柵、測頭跟隨運動控制、以單測頭結合精確定標技術組成工件誤差的精密測量技術實現蝸桿M値的測量,并以此為基礎組成生產現場應用的自動測量線,開拓齒輪在線測量的新方法。如圖2所示,絲桿副與徑向柔性片簧機構后板連接,徑向柔性片簧機構后板通過連接板固定在滑板上。光柵1讀取測頭徑向x的位移變化量,光柵2讀取測頭軸向y的位移變化量,伺服電機1驅動絲桿副實現測頭y方向的位移,氣缸帶動杠桿機構實現測頭x方向的位移。氣缸帶動杠桿機構在x方向施加測力至蝸桿齒面,計算機根據光柵1和光柵2讀取的數據判斷測頭是否進入蝸桿齒槽內,且測頭與蝸桿的齒面緊密貼合。當判斷測頭完全進入蝸桿齒面內,且測頭與蝸桿的齒面緊密貼合后,伺服電機2驅動蝸桿旋轉一周,與此同時,伺服電機1帶動絲杠副使測頭沿蝸桿軸線y方向做跟隨運動。根據光柵1讀取測頭x的位移變化量,即可計算出蝸桿的平均跨棒距M值。
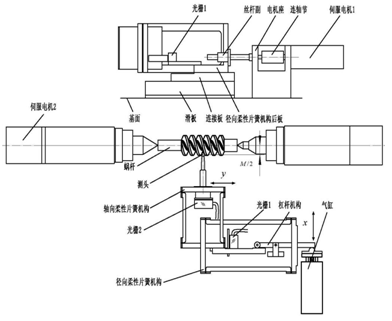
圖2 測量原理圖
2儀器的工作原理及總體設計
2.1工作原理
如圖3為儀器模塊組成示意圖,傳送帶由步進電機帶動,傳送帶上的V定位塊保證蝸桿軸線處于水平狀態。將蝸桿以一端對齊的方式放到傳送帶上,工件運輸至清理模塊,系統通過傳感器1判斷傳送帶上是否存在工件,確定工件存在時,氣缸3將工件提升至左右頂尖水平軸線位置,左右頂尖軸系在氣缸1和2的作用下移動設定的位移量,此時,軸向定位蝸桿。伺服電機1帶動右頂尖軸系旋轉,蝸桿在旋轉過程中,清洗裝置執行清洗工序。
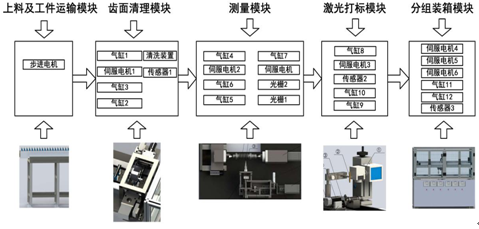
圖3 儀器模塊組成示意圖
齒面清理模塊結束后,蝸桿運輸至測量模塊,蝸桿軸向定位過程同齒面清理模塊,光柵1讀取測頭徑向x方向的位移量,光柵2讀取測頭軸線y方向的位移量,伺服電機帶動絲杠副實現雙片簧精密測量機構y方向運動,氣缸7實現雙片簧精密測量機構在蝸桿徑向x方向上的運動。當測頭與蝸桿的齒面雙面嚙合時,蝸桿在伺服電機2的作用下做旋轉運動,此時,測頭沿蝸桿軸線y方向做跟隨運動。
測量模塊完成后,蝸桿運輸至激光打標模塊,蝸桿軸向定位過程同齒面清理模塊,蝸桿在伺服電機3的作用下做旋轉運動,當傳感器2感知到蝸桿打標位置時,激光打標裝置標記蝸桿,完成蝸桿標記工序。
激光打標模塊結束后,蝸桿運輸至分組裝箱模塊,系統根據測量結果將蝸桿放到分組箱內相應的位置。伺服電機4和伺服電機5分別實現蝸桿沿x和y方向的運動。伺服電機6實現蝸桿沿z方向的運動。氣缸11從傳輸帶上抓取工件。旋轉氣缸12使蝸桿由水平狀態轉至垂直狀態。傳感器3判斷分組箱內蝸桿是否裝滿,如分組箱內裝滿蝸桿,報警信號啟動,分組箱內未裝滿蝸桿,氣缸11將蝸桿放到分組箱內。
2.2儀器總體設計
儀器由上料及工件傳輸模塊、齒面清理模塊、測量模塊、激光打標模塊、分組裝箱模塊、控制單元組成,如圖4所示。
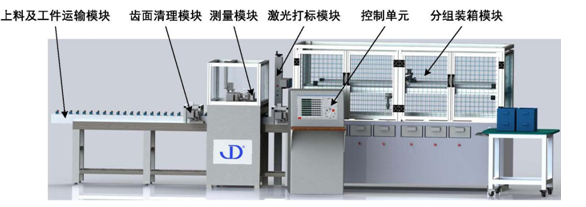
圖4 儀器樣機
2.2.1上料及工件傳輸模塊
主要由帶多個V形定位塊的傳送帶組成;功能為將不同尺寸的工件以一端對齊的方式運輸至相應的模塊處。
2.2.3齒面清理模塊
主要由左右頂尖軸系及清洗裝置組成,該模塊運動形式有左右頂尖軸系沿軸線方向的水平運動和右頂尖軸系旋轉運動。工件運輸至該模塊時,其一端與固定的右頂尖軸系對齊,另一端由左頂尖軸系定位,右頂尖軸系驅動工件旋轉,與此同時啟動壓縮機吹洗齒槽表面,完成蝸桿清理工序,為蝸桿測量做準備。
2.2.4測量模塊
主要由左右頂尖軸系、精達公司獨創的雙片簧精密測量機構,碳化鋼球測頭組成。提升機構將工件由傳送帶升至測量模塊,其一端與固定的右頂尖軸系對齊,另一端由左頂尖軸系定位,右頂尖軸系驅動蝸桿旋轉360°后,在蝸桿徑向方向上施加測力,并使測頭與蝸桿齒面緊密貼合。當蝸桿旋轉時,測頭與蝸桿的齒面保持雙面嚙合狀態,并沿蝸桿軸線方向做跟隨運動,實現工件M值測量工序。該模塊運動形式有左右頂尖沿軸線方向的水平運動、右頂尖軸系的旋轉運動、測頭沿工件軸線方向的運動及測頭沿工件徑向方向的運動。
2.2.5激光打標模塊
由左右頂尖軸系及纖維激光打標機組成。該模塊的運動為左右頂尖軸線沿軸線的水平運動和右頂尖軸系旋轉運動。功能為將M值不同的工件在指定的位置打上標記,也可以按照客戶要求將包含工件信息及精度測量結果的二維碼打標至工件上。
2.2.6分組裝箱模塊
由周轉箱、控制空間xyz三個方向的直線滑軌及旋轉氣缸組成。根據測量所得的蝸桿M值,確定了蝸桿的周轉裝箱位置,機械手經X、Y、Z三個方向的平動后,抓取工件。旋轉氣缸使工件由水平狀態轉至垂直狀態后,將工件放入周轉箱內,實現了蝸桿的分組工序。
3儀器關鍵部件的設計
圖4為右頂尖軸系結構示意圖,軸系采用高精度密珠軸承,由軸、軸套以及密集于兩者之間的具有過盈配合的滾珠組成。滾珠安放于保持架中,程螺旋線分布,保證了右頂尖軸做旋轉運動時的跳動值。端面保持環為是精密軸系沿著軸向方向的兩個支撐點,相當于推力軸承作用。止退圈、十字墊圈及螺套配合作用,構成軸向定位與緊固。選用控制精度高的交流伺服電機通過連軸器驅動右頂尖軸系回轉,電機緊固在電機座上,電機座固定在軸套上。軸套固定在滑板上,整個軸系固定在滑板上。氣缸缸體固定在基座上,氣缸活塞與滑板連接,實現軸系沿軸線y方向的位移。
如圖5所示,左頂尖軸系結構和氣缸作用與右頂尖軸系相同。左頂尖軸軸系中為防止左頂尖軸卡死工件,在左頂尖軸系軸端設置彈簧和調節軸,實現左頂尖軸系自動調節伸縮量,避免了軸系卡死工件的現象。
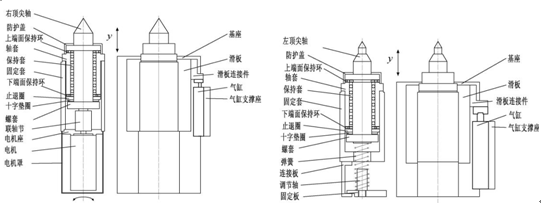
圖4 右頂尖軸系結構圖 圖5 左頂尖軸系結構圖
3.2雙片簧精密測量機構
如圖6所示,雙片簧精密測量機構的主體由兩個方向平行四邊形機構組成。第一個平行四邊形機構由y方向夾板A、B,平動板C及后板D組成。后板D固定,夾板A,B與平動板C和后板D之間由片簧連接,故平動板C可實現平行于x方向的位移。第二個平行由x方向夾板E、F,平動板G及后板H組成。夾板E,F與平動板G和后板H間由片簧連接。第二個平行四邊形機構的平動板與測頭安裝底座相連并由第一個平行四邊形機構中的后板D帶動,故第二個平行四邊形機構和測頭在D的帶動下整體做沿x方向的平動。雙片簧精密測量機構的主體安裝在可沿y方向運動的滑板I上,從而實現在y方向的平動。
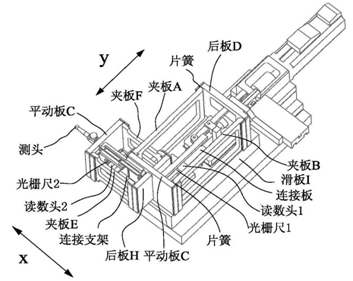
圖6 雙片簧機構結構簡圖
平面平動板C僅在x方向和平行于自身產生位移,這使平面平動板C可貼上x向光柵尺,x向的讀數頭通過連接板安裝在后板D上。平面平動板G僅在y方向和平行于自身產生位移,這使平面平動板G可貼上y向光柵尺,y向的讀數頭通過連接支架安裝在后板H上。
區別于傳統基于雙面嚙合的一維測量原理的齒輪分選機,本文以“雙片簧精密測量機構”數字式二維測頭為核心實現了蝸桿M值的測量,并在測量流水線化理念的基礎上完成了基于M值的蝸桿分選設備的研制。該設備克服了傳統雙面嚙合測量儀在蝸桿測量上存在的弊端,實現了蝸桿測量齒厚誤差的高效高精密測量,該分選機在湖南億利達公司生產現場得到應用檢驗,取得滿意的使用效果。
[1]李俊峰. 基于CNC齒輪測量中心的圓柱蝸桿測量研究[D]. 天津大學, 2009.
[2]湯潔. 齒輪雙面嚙合多維測量理論及技術研究[D]. 北京工業大學, 2009.

